WALKER DESIGN & FEA STUDY

Designed this walker after applying for a research position at Boston University Robotics Lab. This research focuses in the creation of a robotic system implemented in a walker for fall prevention on the elderly. My goal was to understand and familiarize with the simplest walker design, comprehend how forces are distributed in the frame, and start thinking about improvements for this design.
Results
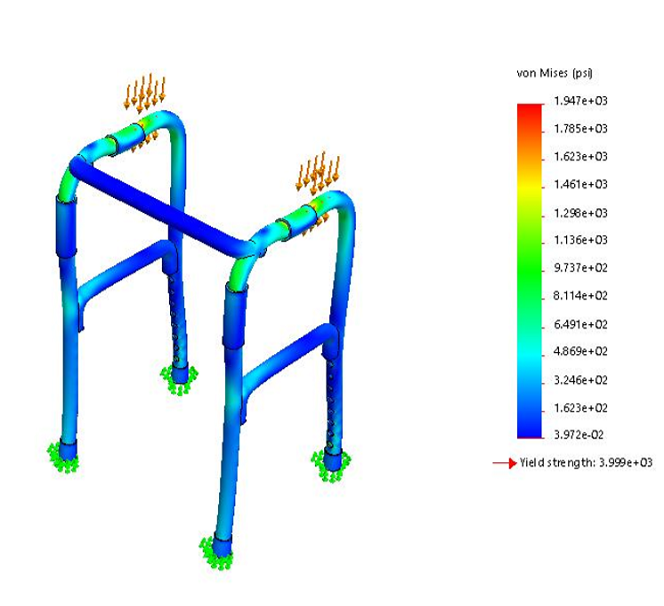
I modelled the walker in SolidWorks; researched the typical dimensions and created a walker of 52x47x90 cm. The material used for the frame was a lightweight aluminium, in this case, Aluminum 1350 Alloy. The maximum force that this product usually withstands is 300 lbs. I created a static simulation using this load. And obtained the location and amount of maximum stress in the body. The result of this study indicates that the maximum stress developed under 300 lbs. is bellowing the yield strength, suggesting the frame is safe.
I intend on making this design more complex by adding wheels and movable members that enables portability. Afterwards, I will conduct static and dynamic simulations to ensure the product is safe, then I can begging to think was to incorporate a sensor for fall detection.